第 12 章 系统的状态变量分析 ¶
about 818 words 12 images reading time 4 minutes
状态 / 状态变量 / 状态矢量:一个动态系统的状态是表示系统的一组最少变量,只需知道 \(t=t_0\) 时刻这组变量和 \(t\geqslant t_0\) 时刻以后的输入, 就能确定系统在 \(t\geqslant t_0\) 时刻以后的行为。
引入状态变量的目的:相当于使用中间变量表示输入输出,可以把一元 N 阶方程转换为 N 元一阶方程,每一阶都用状态变量表示,相邻阶的中间变量之间是一阶关系。
算子 \(p\) 是微分运算,算子 \(1/p\) 是积分运算。算子表达式就是关于积分和微分环节的组合。
1. 连续时间系统状态方程的建立 ¶
状态方程与输出方程分别为:
对于 LTI 系统,ABCD 矩阵是常数,而对于时变系统 ABCD 矩阵是时间的函数。
(看典型结构示意图)
由电路图建立(电路课重点,非本课重点
由系统输入输出方程或信号流图建立状态方程。对于与给定的系统,流图的形式可以不同,状态变量的选择不唯一, ABCD 矩阵也不唯一。
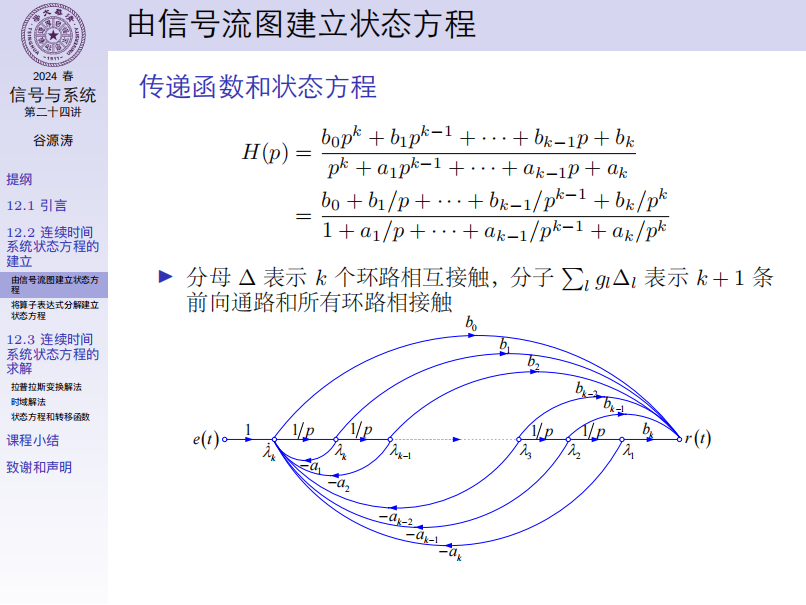
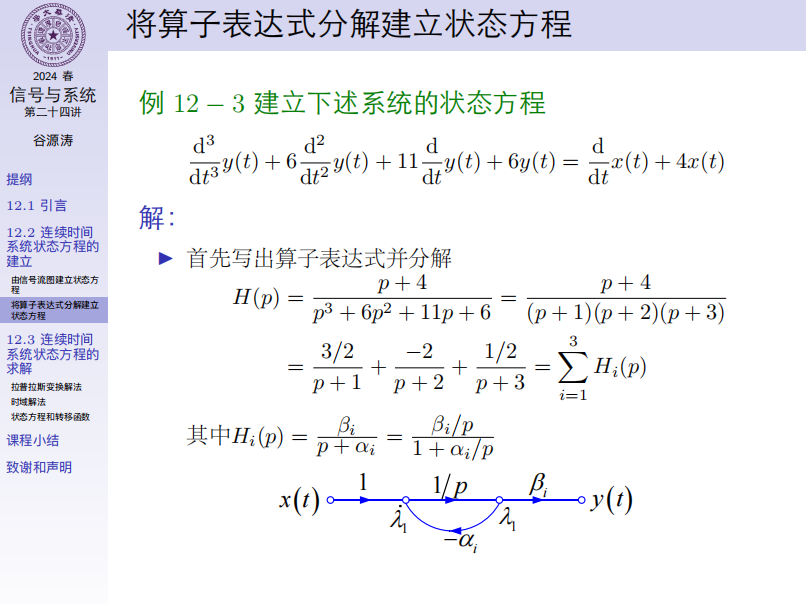
由算子表达式分解或系统函数建立状态方程。部分分式展开 \(H(p)=\sum\frac{\beta_i}{p+\alpha_i}\) ,由基本单元串联、并联、级联组装。
基本单元:
2. 连续时间系统状态方程的求解 ¶
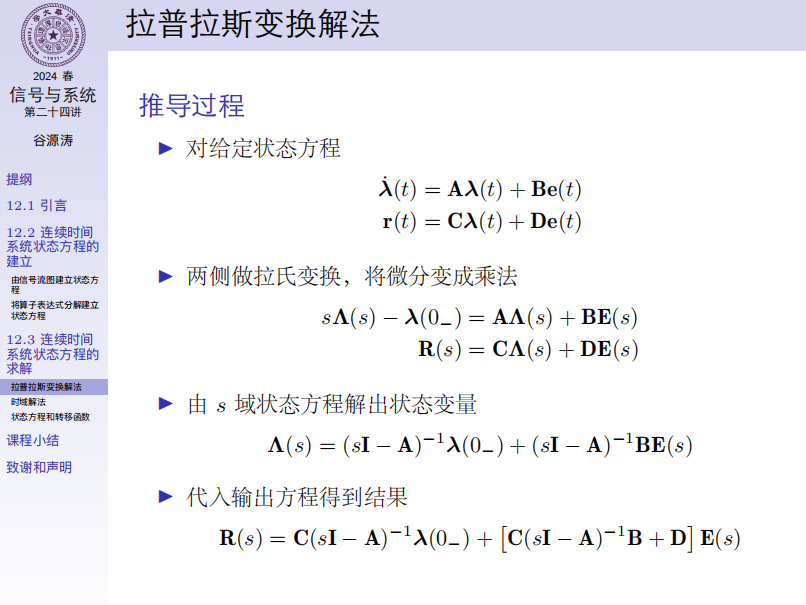
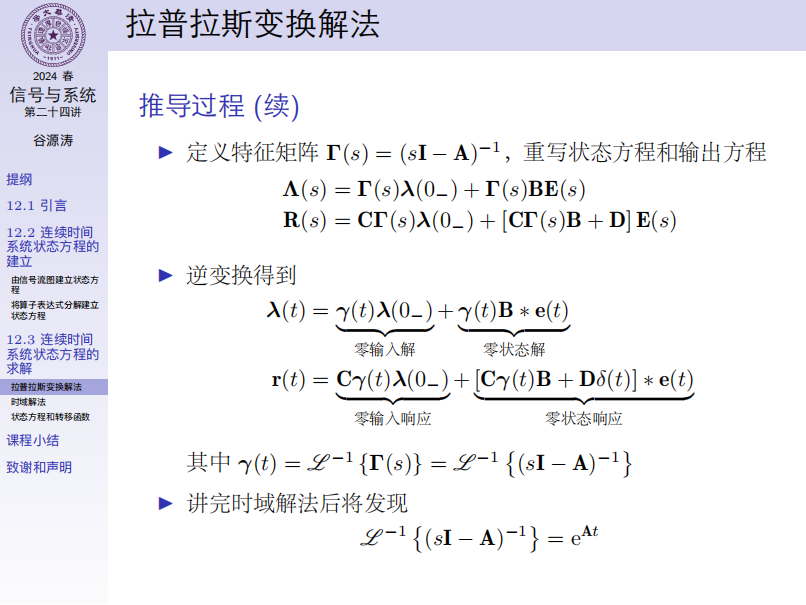
Laplace 变换解法(较为容易)¶
写不动了,直接上图:
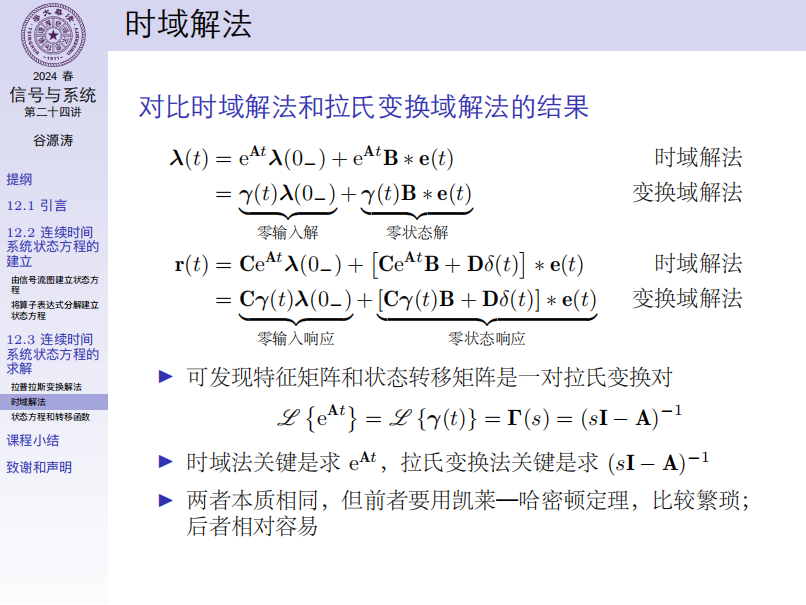
时域解法 ¶
写不动了,直接上图:
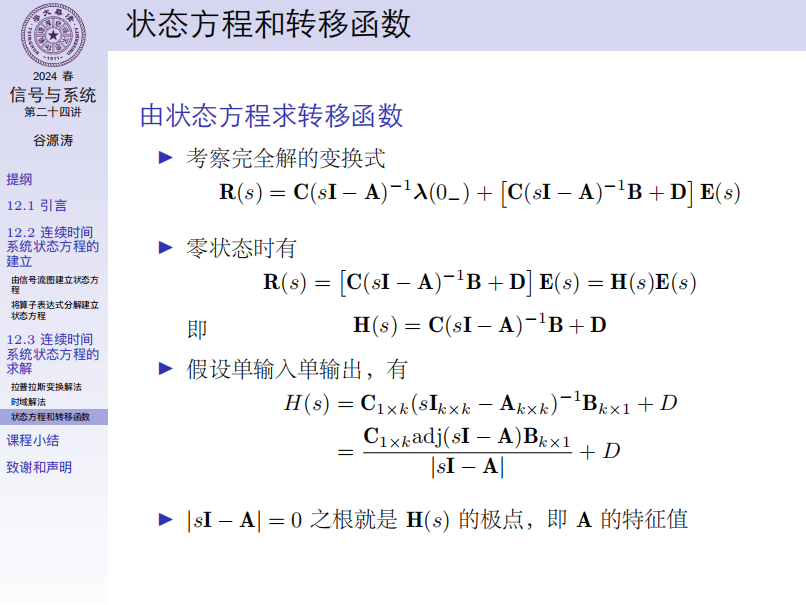
3. 根据状态方程求转移函数 ¶
写不动了,直接上图:
4. 离散时间系统状态方程的建立 ¶
同连续时间系统的形式,用差分代替微分。
(看典型结构示意图)
由定义建立。由框图或流图建立。
5. 离散时间系统状态方程的求解 ¶
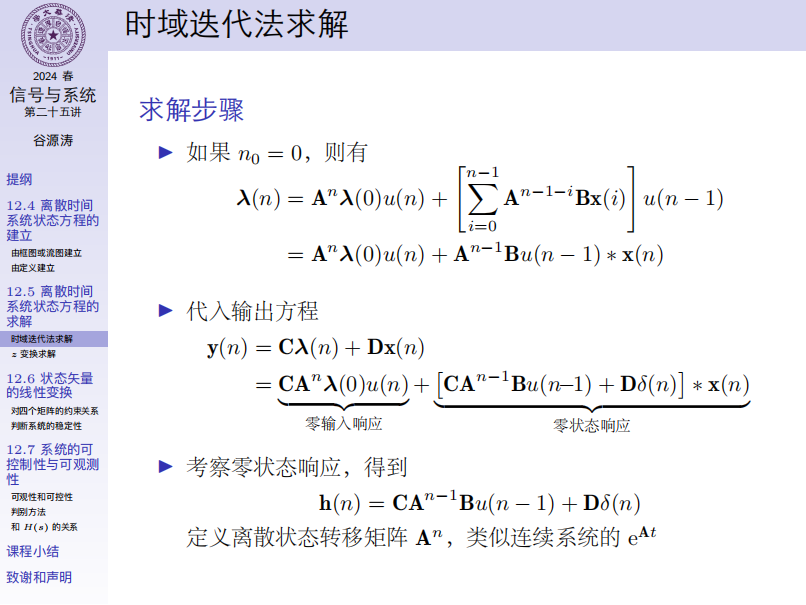
时域迭代法求解 ¶
写不动了,直接上图:
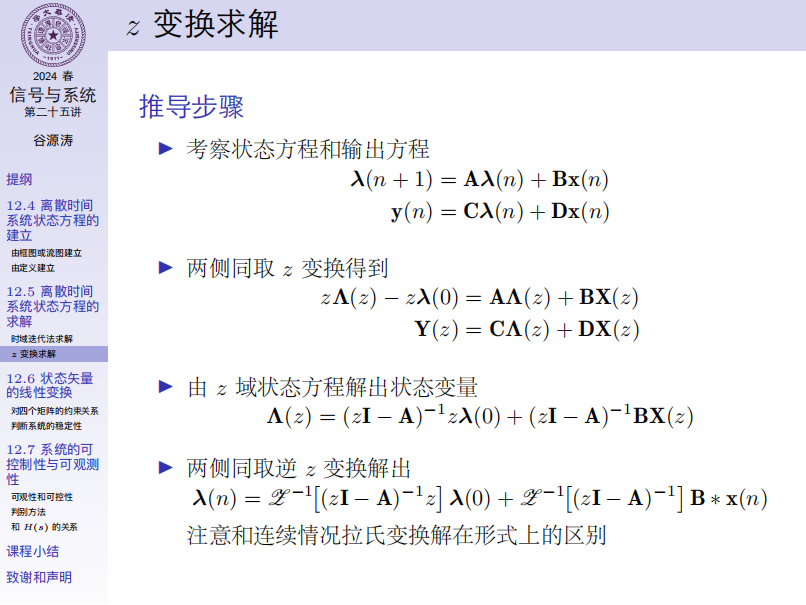
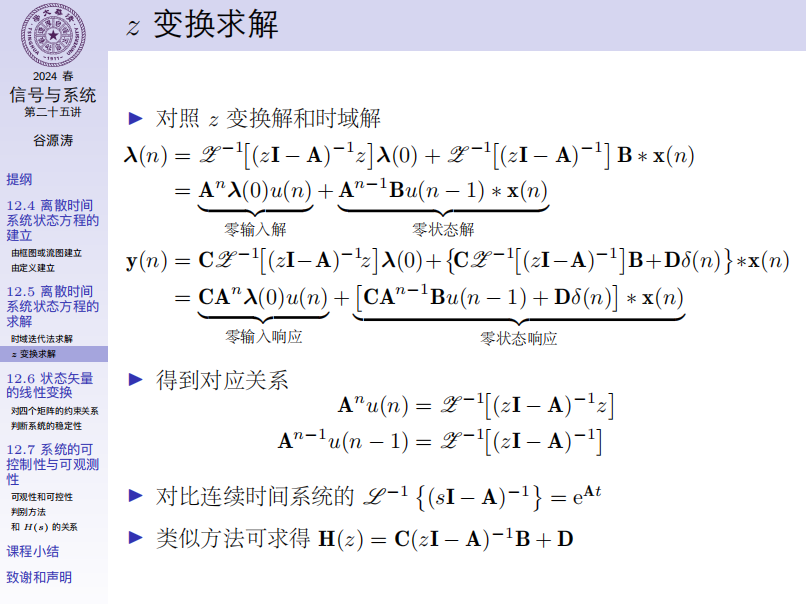
z 变换求解 ¶
写不动了,直接上图:
6. 状态矢量的线性变换 ¶
选择不同的状态矢量可以得到不同的 ABCD 矩阵,各状态矢量之间存在某种约束,矩阵 ABCD 之间存在某种变换关系。
具体细节略。
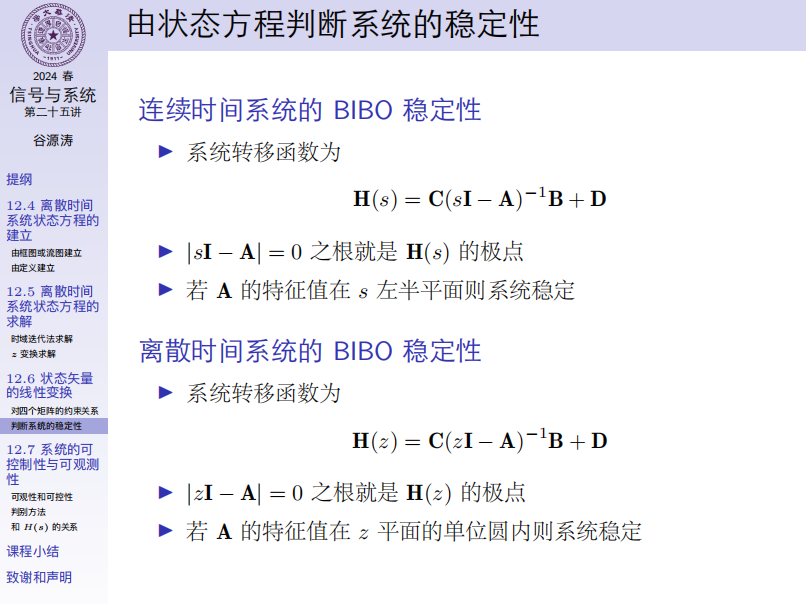
判断系统的稳定性:
7. 系统的可控性和可观性 ¶
可控性 (Controllability):给定起始状态,可以找到容许的输入量 ( 控制矢量 ),在有限时间内把系统的所有状态引向零状态。如果可做到这点,则称系统完全可控。
可观性 (Observability):给定输入 ( 控制 ) 后,能在有限时间内根据系统输出唯一地确定系统的起始状态。如果可做到这点,则称系统完全可观。
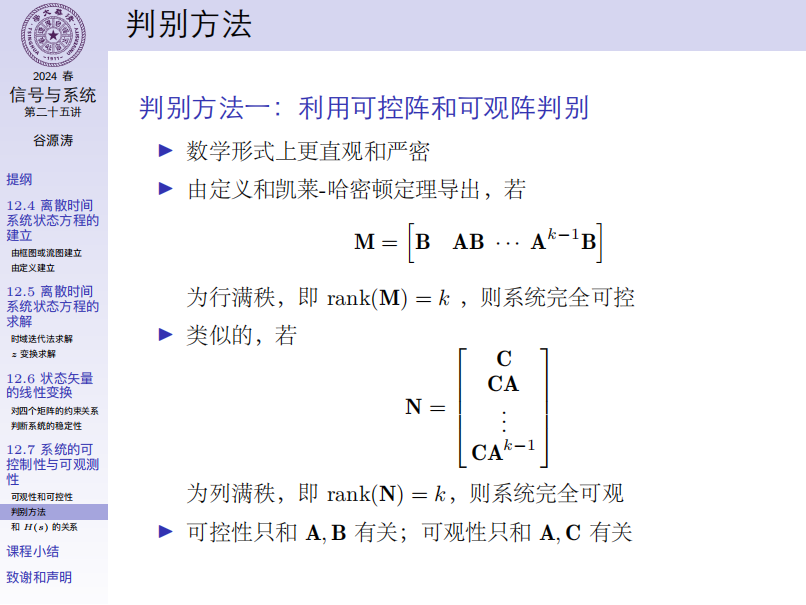
判别方法:
利用可控阵和可观阵判定:
A 矩阵规范化之后判别
可控可观与转移函数的关系:
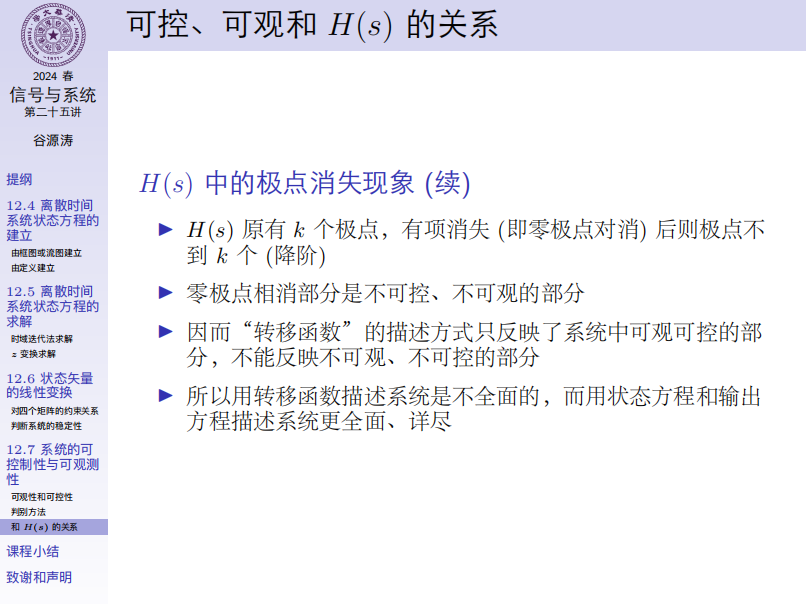
留意一下串联、并联、级联可能发生零极点相消,导致系统不可控不稳定就行。